
搜索结果: 1-15 共查到“测绘科学技术 lidar”相关记录392条 . 查询时间(0.174 秒)

2022年4月12日,由山东科技大学校研究生会学术部主办,测绘与空间信息学院研究生会承办的第1055期研究生讲坛在线上成功举办。测绘与空间信息学院研究生郭娇娇作了题为“高密度复杂地形区机载LiDAR数据滤波算法”的专题讲座,学院相关专业老师和同学参会。
获取堤防中心线、堤顶堤坡和断面等特征信息对于堤防破损检测和安全评估具有重要意义。LiDAR技术为堤防检测工作提供了便利,LiDAR生成的DTM是一种连续化的地表数据,用于堤防特征信息提取具有工作量小、数据精度高的极大优势。本文提出了一种使用机载LiDAR生成的DTM数据开展堤防特征信息提取方法,采用圆环探测实现堤防中心线生成,与常规方法相比可以很好地规避堤防因侵蚀、垮塌等原因造成中心线数据变形、截...
结合区域增长与RANSAC的机载LiDAR点云屋顶面分割
屋顶面分割 迭代区域增长 RANSAC 机载LiDAR点云
2021/6/30
建筑物屋顶面大小差异较大、形状复杂、数量不确定等特点,以及机载LiDAR点云密度不均、分布不规则、缺乏语义信息等特性,对屋顶面的准确分割造成了很大干扰,因此现有分割方法的精度和适用性仍有待提高。针对上述问题,本文提出一种结合区域增长与RANSAC的机载LiDAR点云屋顶面分割方法。首先,引入稳健的法向量估计算法计算点云法向量,利用提出的迭代区域增长策略和RANSAC提取多个可靠屋顶面片;然后,基于...
针对城市道路场景中车载LiDAR点云数据质量差、各类地物相互遮掩的情况,提出杆状地物自动提取与分类算法。先通过改进数学形态学算法移除点云数据中的地面点,再根据杆状地物的形态特征,使用纵向格网模板初步提取杆状地物,然后对提取的疑似杆状地物进行点云数据规则化并通过统计分析移除噪声点,最后根据预先建立的杆状地物样本训练SVM分类模型,对提取的杆状地物进行分类。试验表明,本文方法能够在数据质量欠佳的情况下...
机载LiDAR点云的分类是利用其进行城市场景三维重建的关键步骤之一。为充分利用现有的图像领域性能较好的深度学习网络模型,提高点云分类精度,并降低训练时间和对训练样本数量的要求,本文提出一种基于深度残差网络的机载LiDAR点云分类方法。
INSTANTANEOUS COASTLINE EXTRACTION FROM LIDAR POINT CLOUD AND HIGH RESOLUTION REMOTE SENSING IMAGERY
coastline image segmentation LiDAR region growing
2018/5/14
A new method was proposed for instantaneous waterline extraction in this paper, which combines point cloud geometry features and image spectral characteristics of the coastal zone. The proposed method...
CROWN-LEVEL TREE SPECIES CLASSIFICATION USING INTEGRATED AIRBORNE HYPERSPECTRAL AND LIDAR REMOTE SENSING DATA
Tree species classification Crown-scale spectral Crown-scale structure LiDAR Hyperspectral
2018/5/17
Mapping tree species is essential for sustainable planning as well as to improve our understanding of the role of different trees as different ecological service. However, crown-level tree species aut...
AUTOMATIC GLOBAL REGISTRATION BETWEEN AIRBORNE LIDAR DATA AND REMOTE SENSING IMAGE BASED ON STRAIGHT LINE FEATURES
Registration Automatic LiDAR Remote Sensing Straight Line Similarity Measure
2018/5/15
An automatic global registration approach for point clouds and remote sensing image based on straight line features is proposed which is insensitive to rotational and scale transformation. First, the ...
IMPROVEMENT ON TIMING ACCURACY OF LIDAR FOR REMOTE SENSING
Laser rangefinding Leading-edge timing discrimination Walk error MATLAB Lidar data quality
2018/5/17
The traditional timing discrimination technique for laser rangefinding in remote sensing, which is lower in measurement performance and also has a larger error, has been unable to meet the high precis...
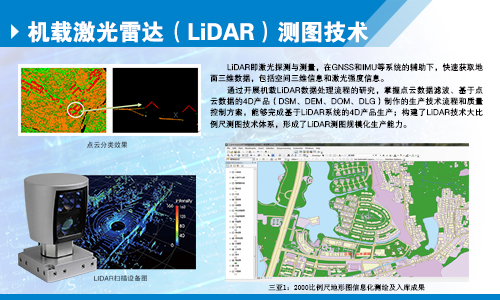
机载激光雷达(LiDAR)测图技术(图)
激光雷达 测图技术 重庆测绘院
2024/12/18
LiDAR即激光探测与测量,在GNSS和IMU等系统的辅助下,快速获取地面三维数据,包括空间三维信息和激光强度信息。
CHALLENGES AND OPPORTUNITIES: ONE STOP PROCESSING OF AUTOMATIC LARGE-SCALE BASE MAP PRODUCTION USING AIRBORNE LIDAR DATA WITHIN GIS ENVIRONMENT. CASE STUDY: MAKASSAR CITY, INDONESIA
Automation LiDAR Processing Base Map Production GIS Accuracy Assessment
2017/7/12
LiDAR data acquisition is recognized as one of the fastest solutions to provide basis data for large-scale topographical base maps worldwide. Automatic LiDAR processing is believed one possible scheme...
BUILDING ROOF BOUNDARY EXTRACTION FROM LiDAR AND IMAGE DATA BASED ON MARKOV RANDOM FIELD
Markov Random Field LiDAR Aerial images Building roof boundary
2017/7/12
In this paper a method for automatic extraction of building roof boundaries is proposed, which combines LiDAR data and highresolution aerial images. The proposed method is based on three steps. In the...
AN EFFICIENT METHOD TO CREATE DIGITAL TERRAIN MODELS FROM POINT CLOUDS COLLECTED BY MOBILE LiDAR SYSTEMS
Mobile systems point cloud Digital Terrain Models LiDAR Delaunay triangulation Laplacian operator
2017/7/12
The digital terrain models (DTM) assume an essential role in all types of road maintenance, water supply and sanitation projects. The demand of such information is more significant in developing count...
FOREST STEM VOLUME CALCULATION USING AIRBORNE LIDAR DATA
Aerial LiDAR nDSM tree height canopy height stand volume Pleaides multispectral image
2017/7/12
Airborne LiDAR data have been collected for the city of Istanbul using Riegl laser scanner Q680i with 400 kHz and an average flight height of 600 m. The flight campaign was performed by a ...
WEAKLY SUPERVISED SEGMENTATION-AIDED CLASSIFICATION OF URBAN SCENES FROM 3D LIDAR POINT CLOUDS
Classification Segmentation Regularization LiDAR Urban Point Cloud Random Forest
2017/7/12
We consider the problem of the semantic classification of 3D LiDAR point clouds obtained from urban scenes when the training set is limited. We propose a non-parametric segmentation model for urban sc...