
搜索结果: 1-15 共查到“控制科学与技术 模态”相关记录29条 . 查询时间(0.125 秒)
中值互补集合经验模态分解
模态分裂 中值算子 互补白噪声 互补集合经验模式分解
2024/1/16
针对经验模态分解(Empirical mode decomposition,EMD)系列方法存在的模态分裂(Mode splitting,MS)问题,提出中值互补集合经验模态分解(Median complementary ensemble EMD,MCEEMD)算法.通过概率模型量化互补集合经验模态分解(Complementary ensemble EMD,CEEMD)的MS问题,证明了使用中值算...


2021年12月,中国科学院沈阳自动化研究所工业控制网络与系统研究室在机械臂多模态随动感知领域取得了新进展,提出了一种多模态感知单元的空间联合标定方法,相关研究成果以论文形式(Monocular Visual-Inertial and Robotic-Arm Calibration in a Unifying Framework)发表在国际自动化领域的权威期刊IEEE/CAA Journal of...

全媒体多模态大模型研发计划发布 助力媒体融合发展(图)
“全媒体多模态大模型” “紫东太初” 媒体融合 智能化
2022/3/4
2021年12月5日,第九届中国新兴媒体产业融合发展大会在海南博鳌举行。中国科学院自动化研究所、新华社技术局、媒体融合生产技术与系统国家重点实验室联合发布“全媒体多模态大模型研发计划”,将在媒体科技领域进行全新合作,通过技术创新推动媒体融合发展。
中国科学院自动化研究所发布跨模态通用人工智能平台“紫东太初”
“紫东太初” 人工智能平台 AI应用
2021/8/13
2021年7月9日,中国科学院自动化研究所所长徐波在2021世界人工智能大会(WAIC2021)上就人工智能的最新进展进行报告,发布了自动化所研发的跨模态通用人工智能平台――“紫东太初”。“紫东太初” 跨模态通用人工智能平台以多模态大模型为核心,基于全栈国产化基础软硬件平台,可支撑全场景AI应用。

中国科学院关键技术研发团队项目“多模态分子影像关键技术”顺利通过结题验收(图)
中国科学院 多模态分子影像 关键技术 结题验收
2019/10/16
2019年9月27日,由我所分子影像院重点实验室承担的中国科学院关键技术研发团队项目“多模态分子影像关键技术”顺利通过专家组结题验收。项目验收会由徐涛院士主持,生命医学领域的11位科学仪器专家和条财局领导出席了会议。结题验收会上,项目负责人田捷研究员对项目团队近三年所取得的成果进行了全面的总结汇报,对团队在关键技术、临床应用和产业转化方面所取得的全链条创新成果做了详细介绍。团队核心骨干成员代表惠辉...
移动机器人主要依靠激光雷达采集的点云和摄像机采集的图像信息来感知周围环境. 在极端天气或夜晚的情况下, 摄像机采集图像会受到极大干扰; 本文基于聚类典型相关分析(cluster-CCA)提出一种面向室外移动机器人的雷达图像跨模态检索技术, 首先利用深度学习网络提取点云和图像的特征, 然后使用聚类典型相关分析将两种模态的特征映射到子空间, 最后计算欧氏距离进行检索, 可以从图像数据库中检索得出与点云...
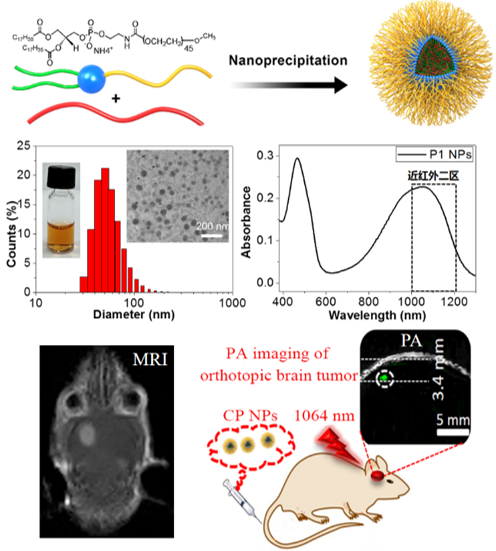
脑胶质瘤是一种严重危害人类健康的中枢神经系统重大脑疾病。脑胶质瘤细胞的生长特点为浸润性生长,沿着神经纤维向周围脑区弥漫播散,与正常脑组织无明显界限,手术难以完全切除,术后极易复发。因此,精准识别脑胶质瘤边界是当前医学界迫切需要解决的关键科学问题。在科技部973项目“脑胶质瘤精准诊疗技术的关键科学问题研究”的资助下,郑海荣、盛宗海和刘斌等在前期工作的基础上(ACS Nano, 2017, DOI: ...
微隧穿式陀螺仪检测模态的线性二次高斯控制
隧道检测 陀螺仪 检测模态 线性二次高斯控制
2014/3/21
为了将微隧穿式陀螺仪(MTG)的隧尖与检测电极之间的隧道间隙及其变动量分别维持在1 nm和0.1 nm并降低系统噪声和扩大带宽,本文为其检测模态设计了线性二次高斯(LQG)闭环反馈系统。在利用微小量法对呈指数规律的隧道效应进行线性化的基础上,建立了MTG检测模态的线性化模型,并将哥氏加速度和电子隧道1/f噪声分别当作主要的过程噪声和输出噪声,设计了由最优状态估计器和线性二次(LQ)状态调节器组成的...
基于GMM的多模态过程模态识别与过程监测
多模态过程 过程监测 模态识别 连续退火机组
2015/5/19
多模态复杂过程的多变量、多工序、变量时变性以及模态转换时间不确定等多种原因, 导致面向多模态生产过程的监测问题十分复杂. 对此, 基于高斯混合模型的监测方法, 结合定性知识和定量知识, 解决了多模态过程监测中离线数据模态划分、稳定模态和过渡模态的监测模型建立以及在线数据的模态识别等关键问题, 最终实现了对多模态过程的监测.
针对激振器激励方式在模态测试中因力传感器附加质量影响会使测量频响函数不准确、附加质量大小难以准确获知等问题,提出基于测量的频响函数辨识力传感器附加质量方法,为消除该附加质量影响提供依据。分析附加质量对结构频响函数的修改,并推导用测量频响函数表达附加质量的通用公式;通过数值仿真验证方法的可行性;采用激振器+激光测振仪方案对简支梁进行模态实验,用简支梁两点的驱动点及跨点频响函数(共四组数据)辨识力传感...
基于模板匹配和镜像延拓的两阶段经验模态分解算法
经验模态分解 模板匹配 镜像延拓 端点效应
2013/12/10
针对传统经验模态分解算法存在的端点效应问题,提出了一种适用于脉搏信号分析的基于模板匹配和镜像延拓的两阶段经验模态分解算法。依据脉搏信号的类周期特征,首先识别其特征信息,分离出单一心动周期内的脉搏信号;然后使用信号相干平均技术获取脉搏信号模板,依据模板将首尾端点处的脉搏信号扩展至整个心动周期;最后采用镜像延拓方法对扩展后的脉搏信号进行经验模态分解。实验结果表明,扩展后的脉搏信号能够较好地模拟原信号首...

2012年2月26日,由中国科学院自动化研究所田捷研究员任首席科学家的国家重点基础研究发展计划(973计划)滚动支持项目“多模态分子影像关键科学问题研究”召开2011年度总结会,对项目过去一年的研究进展进行了全面总结。
矿浆管道输送流速仿人智能多模态控制研究
矿浆管道输送 多泵站输送平台 输送流速 仿人智能控制
2012/2/27
针对矿浆管道输送流速控制的大时滞、建模困难等问题,提出分段变增量的仿人智能多模态控制新算法.将完整矿浆批量输送实际过程划分成多段特征模态,采用不同的控制增量算法以推理确定控制模态. 基于新研制的多泵站管道输送平台,给出了系统结构框图与算法模块设计,采用两种矿浆管道批量输送流速运行方式,实现了满意的实时控制,验证了控制系统结构与算法的可行性和有效性.